|
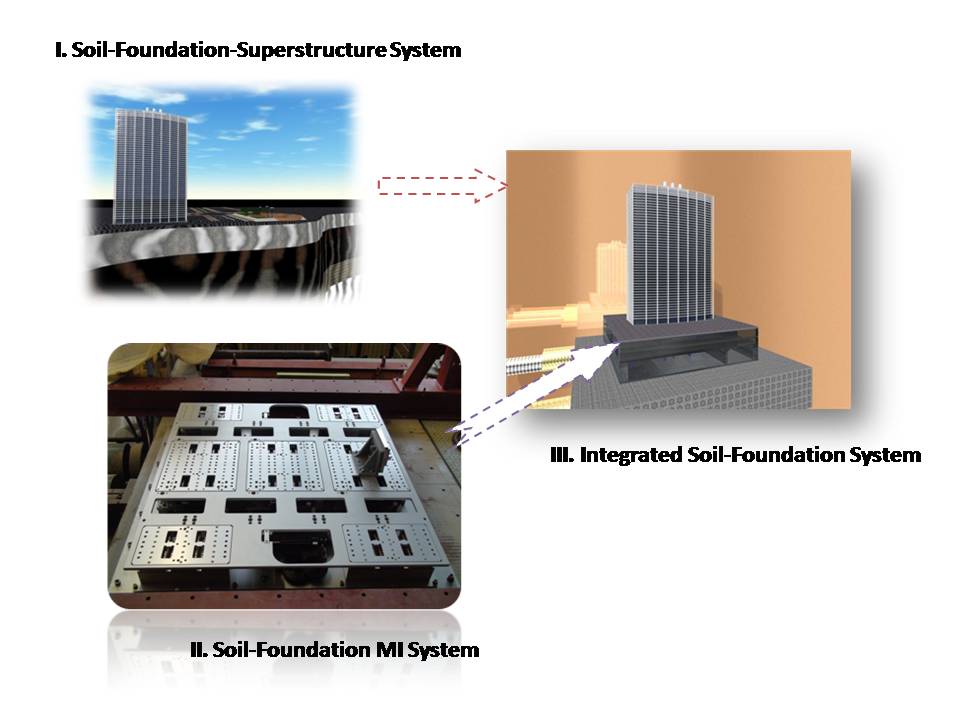
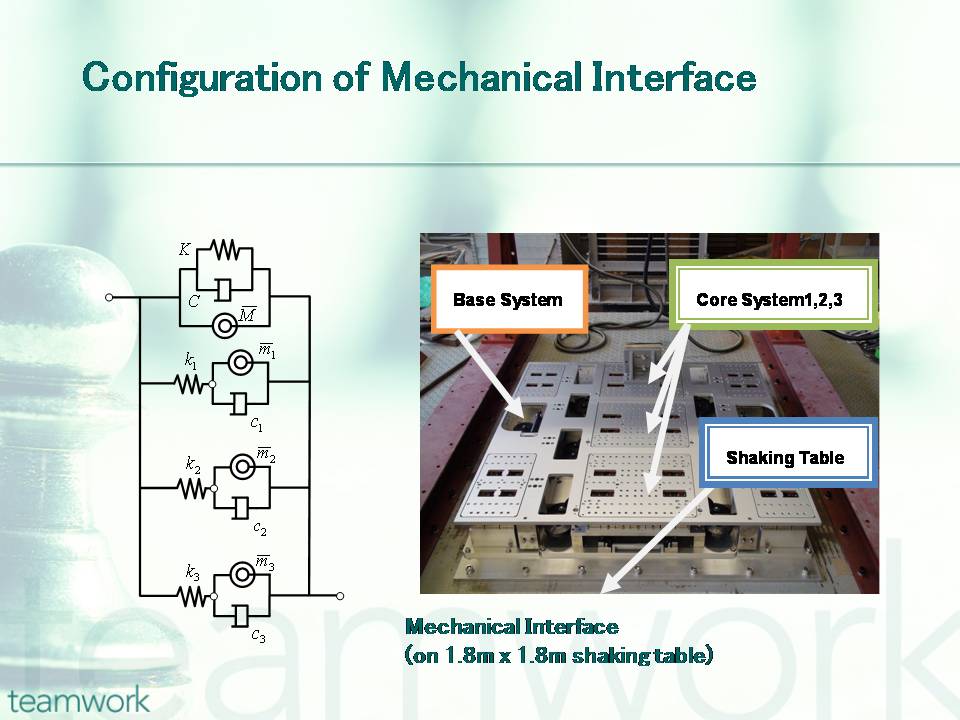
The purpose of this project is to generate a so called "Mechanical Interface" that simulates soil-foundation systems showing frequency-dependent impedance characteristics. Although various types of simulators have been proposed for representing soil-foundation systems over the world, most of the simulators are based on the active-control concept. Needless to say, the active-control simulators are difficult to simulate realistic behavior of soil-foundation-superstructure systems when the superstructure exceeds the elastic region. This project has been trying to create a passive-type mechanical interface without any active control. This mechanical interface may accomplish higher performance as a new simulator that can be applied beyond an elastic region of structural members.
This project is based on the work supported by the ministry of Education, Culture, Sports, Science and Technology, Japan, under Grant-in-Aid for Young Scientists (A) no. 20686031. Any opinions, findings and conclusions or recommendations expressed in this material are those of the author and do not necessarily reflect the views of the sponsors.
|
|
|